
Introduction :
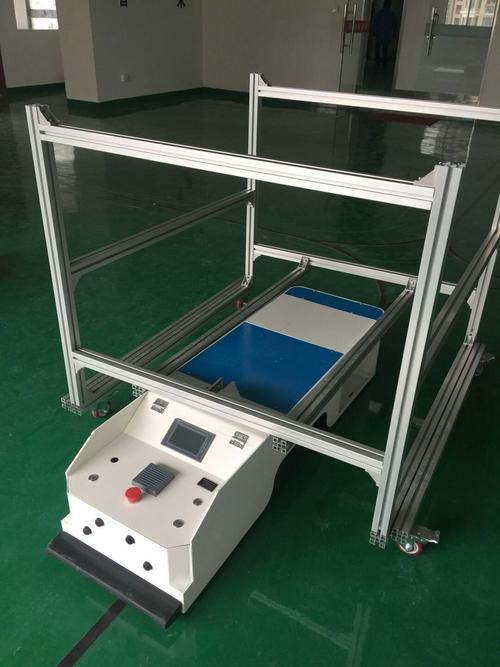
The body the AGV is low ,but the carrying capacity is large , the robot can dives into the bottom of the material car and use the electric lifting rod to hook the car then hauling it . It can also use the back hook to link and hauling several material cars in one time. This robot is suitable for the production system which need a large quantity of material supply or using for form the flexible production line . The main function is help to replace workers to complete the material distribution and empty material cars recovery.
Parameter:
AGV Carrier Size (Customizable) | |
Length | 4859mm |
Width | 1800mm |
Height | 320mm |
Spin Radius | 2450mm |
Basic Parameters | |
Guidance Method: | Hybrid Guidance (Laser Guidance + Magnetic Nail Guidance) |
Walking Function Forward | Reverse, Turn, Spin, Pan, Differential |
Braking Method | Geared Motor, Electromagnetic Brake |
Drive And Steering Mode | Double Steering Wheel Drive And Steering |
Channel Width | >6m |
Climbing Performance | 3° |
Spin Radius | 2400mm |
Communication Method | WLAN |
The Battery Is Equipped | With a 48V Lead-Acid Battery 200 Ah |
Charging Method | Automatic Charging (With Manual Charging) Use Charging Method When No Handling Task |
Guidance Accuracy | ±10mm |
Stop Accuracy | ±5mm |